De acuerdo a la geometría clásica, se denomina poliedro a ciertos cuerpos geométricos tridimensionales, de caras planas y que encierran un volumen finito. Es decir que un poliedro es una porción acotada de espacio geométrico, limitada por distintos polígonos. Su nombre proviene de la voz griega polyedron, compuesto por polys: “muchos”, y edra: “base” o “cara”.
Su denominación depende del número de caras que presente, empleando para ello prefijos numerales de ascendencia griega y la terminación –aedro. Por ejemplo: tetraedros (4 caras), pentaedros (5 caras), hexaedros (6 caras) y así sucesivamente. Además, muchos poliedros tienen sus nombres propios, como cubo, prisma, pirámide, etc.
Elementos de los poliedros
Todos los poliedros tienen los mismos elementos, aunque en diferente cantidad y forma.
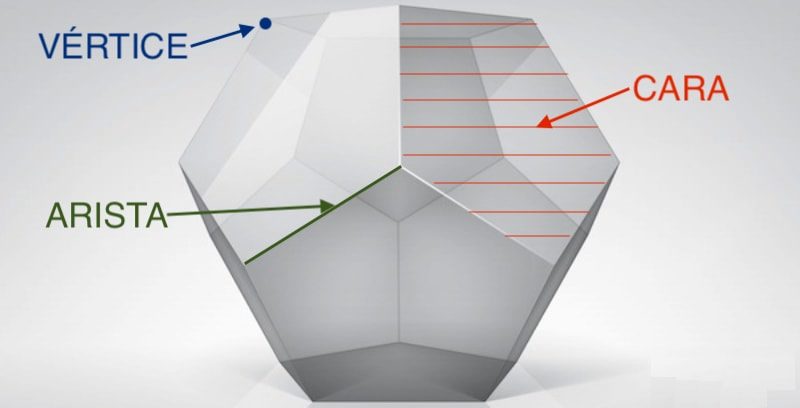
Los poliedros están constituidos por los siguientes elementos:
Caras. Las superficies planas que delimitan el espacio interno del poliedro. Son bidimensionales y son figuras cerradas compuestas por líneas. También puede decirse que son los polígonos que lo constituyen. Entre ellas suelen distinguirse las bases, que son simplemente las caras sobre las cuales descansa el poliedro.
Aristas. Las líneas que componen el cuerpo de un poliedro, y en cuyas intersecciones aparecen los vértices.
Vértices. Los ángulos de encuentro entre tres o más aristas en el cuerpo de un poliedro.
Clasificación de los poliedros
Más allá de darles nombre según su número de caras, como explicamos al inicio, los poliedros pueden clasificarse según la forma y relación de sus caras, teniendo así:
Poliedros regulares. Cuando todas sus caras son polígonos regulares.
Poliedros uniformes. Cuando todas sus caras son iguales entre sí.
Poliedros irregulares. Cuando poseen caras desiguales entre sí.
Ejemplos de poliedros
Un dodecaedro tiene doce caras regulares y uniformes.
Los siguientes son ejemplos de poliedros:
Pirámides. Constituidas por una base y diversas caras triangulares.
Cubos. Conformados por la unión de seis rectángulos regulares.
Paralelepípedos. Construidos mediante dos cuadrados regulares y cuatro rectángulos iguales entre sí.
Prismas. Cuyas caras son paralelogramos, tantos según lados tengan sus dos bases.
Dodecaedros. Poliedros cóncavos o convexos de doce caras regulares y uniformes.
Octaedro. Construido al unir dos pirámides por la base.
El Pabellón Alemán de Barcelona fue diseñado por Ludwig Mies van der Rohe y Lilly Reich como pabellón de Alemania para la Exposición Internacional de Barcelona que se celebró en Montjuïc.
El Pabellón de Barcelona, obra simbólica del Movimiento Moderno, ha sido estudiado e interpretado exhaustivamente al tiempo que ha inspirado la obra de varias generaciones de arquitectos. Fue diseñado por Ludwig Mies van der Rohe y Lilly Reich como pabellón nacional de Alemania para la Exposición Internacional de Barcelona de 1929. Construido con vidrio, acero y distintos tipos de mármol, el Pabellón se concibió para albergar la recepción oficial presidida por el rey Alfonso XIII junto a las autoridades alemanas.
Tras la clausura de la Exposición, el Pabellón fue desmontado en 1930. Con el tiempo se convirtió en un referente clave tanto en la trayectoria de Mies van der Rohe como para el conjunto de la arquitectura del siglo XX. La significación y el reconocimiento del Pabellón llevaron a pensar en su posible reconstrucción.
En 1980, Oriol Bohigas impulsó esta iniciativa desde la Delegación de Urbanismo del Ayuntamiento de Barcelona, e Ignasi de Solà-Morales, Cristian Cirici y Fernando Ramos fueron los arquitectos designados para la investigación, el diseño y la dirección de la reconstrucción del Pabellón.
Los trabajos se iniciaron en 1983 y el nuevo edificio se inauguró en 1986 en su emplazamiento original.
Materiales Cristal, acero y cuatro tipos distintos de piedra (travertino romano, mármol verde de los Alpes, mármol verde antiguo de Grecia y ónice dorado del Atlas) fueron los materiales utilizados en la reconstrucción. Todos ellos de las mismas características y procedencia que los utilizados inicialmente en 1929.
La originalidad de Mies van der Rohe en el uso de los materiales no radica en la novedad de los mismos sino en el ideal de modernidad que expresaban a través del rigor de su geometría, de la precisión de sus piezas y de la claridad de su montaje.
La silla Barcelona Mies van der Rohe y Lilly Reich diseñaron, especialmente para el Pabellón, una silla a base de piel y perfil metálico que, con el tiempo, se convirtió en un icono del diseño moderno. Prueba de ello es que la silla Barcelona es un modelo que todavía se produce y comercializa en la actualidad.
La escultura de Georg Kolbe La escultura es una reproducción en bronce de la que con el título de Amanecer realizó Georg Kolbe, artista contemporáneo a Mies van der Rohe. Está magistralmente situada en un extremo del estanque pequeño, en un punto donde no solamente se refleja en el agua sino también en el mármol y en los cristales, dando la sensación de que se multiplica en el espacio y contrastando sus líneas curvas con la pureza geométrica del edificio.
Plano Planta.PDF
Mies van der Rohe y Reich
Ludwig Mies van der Rohe nace en Aquisgrán el 27 de marzo de 1886, hijo de Jakob Mies (negociante de mármoles) y Amalia Rohe. En 1913, con su esposa Ada Bruhn se traslada a Werder (a las afueras de Berlín), donde se instala. Allí nacen sus hijas Marianne y Waltrani, y más tarde Dorotea, que cambia el nombre por el de Georgia. Hasta entonces, sus relaciones personales y profesionales se habían desarrollado entre las familias acomodadas. La guerra de 1914-1918 trastocó dichas relaciones; Ludwig se separa de su familia y entra en contacto, de la mano de Hans Richter, con la vanguardia del momento: Van Doesburg, Man Ray, Hilberseimer, Walter Bejamin y Raoul Hausmann, entre otros.
Desde su participación en la exposición de viviendas de Weissenhof, en Stuttgart, entre 1925 y 1927, mantiene una relación con la diseñadora e interiorista Lilly Reich que se prolonga hasta 1939. Colaboran en la Glassraum (‘habitación de vidrio’) de l’exposición de Stuttgart de 1927, así como en el Pabellón de Barcelona del año 1929, en la casa Tugendhat de Brno entre 1928 y 1930, y en la casa que presentaron en la exposición de Berlín de 1931.
En el año 1930, el alcalde de Dessau le propone dirigir la Bauhaus, donde sucederá a Hannes Mayer, que la había dirigido desde 1928 en sustitución de su fundador Walter Gropius. Le ayudan en este periodo Lilly Reich y Hilberseimer. Posteriormente, la mayoría nazi del Consejo Municipal de Dessau surgida de las elecciones de 1931 decide clausurarla, lo que obliga a trasladarla a Berlín como centro privado adscrito a Mies van der Rohe. Éste negocia con el ministro nazi Rosemberg y, finalmente, en 1933 decide cerrarla antes que ceder a las presiones ideológicas que recibía; también la falta de recursos influyó en ello.
Mies se instala en los Estados Unidos en 1938, concretamente en la ciudad de Chicago, donde trabaja en la escuela de arquitectura del Armour Institute of Technology, de la que es nombrado director. Proyecta y construye el campus del nuevo Illinois Institute of Technology, así como sus edificios prismáticos, con estructura de acero y cierres de obra vista y cristal.
Lilly Reich se introdujo en el campo de la arquitectura después de haber estudiado diseño e industrias textiles. En 1908 se trasladó a Viena, donde trabajó en el Wiener Werkstätte, una asociación de artistas, arquitectos y diseñadores que apostaban por la integración de todas las artes en un proyecto común, sin distinción entre artes mayores y menores. También trabajó brevemente con el arquitecto Josef Hoffmann, uno de sus ideólogos. Volvió a instalarse en Berlín en 1911, trabajando ya de forma independiente. Ahí entró a formar parte de la Deutscher Werkbund, una asociación fundada en 1907 formada por industriales, arquitectos y artistas y que marcó el diseño industrial alemán. Lilly Reich destacó por sus ideas y capacidad organizativa, adquiriendo cada vez más responsabilidades hasta ser nombrada su directora en 1920.
Entre 1925 y 1938 Lilly Reich y Mies van der Rohe colaboraron estrechamente en diferentes proyectos, y en 1928 fue nombrada “directora artística” de la sección alemana de la Exposición de Barcelona, compartiendo así el mismo cargo que ostentaba Mies van der Rohe. Su situación en la Alemania Nacional Socialista no fue fácil, estuvo tres años en un campo de trabajos forzados durante la guerra. Tras el conflicto, luchó por intentar que Berlín recuperara cierta normalidad, y fue la responsable del restablecimiento de la Deutscher Werkbund, que finalmente se restituyó en 1950, después de su muerte.
Etimológicamente, el término axonométrico quiere decir eje y medida (axo-métrico). Fue definido por el matemático francés Desargües en el Siglo XVII, siglo de las sistematizaciones científicas. Este sistema de representación nos proporciona, al igual que el Sistema Cónico, una visión directa y de muy fácil interpretación al primer golpe de vista de los cuerpos que por su medio se representan.
Las proyecciones o dibujos con él representados reciben el nombre de perspectivas, existiendo tres tipos de perspectivas, la axonométrica ortogonal, la axonométrica oblicua o caballera y la cónica, según el sistema de representación empleado. El tipo de proyección que se emplea es este sistema es, como en el Sistema Diédrico Ortogonal, Cilíndrica Ortogonal. El Sistema Axonométrico Ortogonal emplea un solo plano de proyección denominado Plano del cuadro o de proyección (coincidente con nuestro soporte, generalmente el papel) sobre el que se proyectan directamente los elementos representados. Además intervienen 3 planos auxiliares que proporcionan otras tantas proyecciones, cada punto del espacio queda totalmente definido con estas tres proyecciones auxiliares y la directa sobre el plano del cuadro. Los tres planos auxiliares antedichos forman entre sí un triedro trirrectángulo (poliedro formado por tres planos que se cortan dos a dos, según ángulos rectos) que tiene su vértice O coincidente con el plano del cuadro. El procedimiento es totalmente reversible, a las cuatro proyecciones de un punto señaladas corresponde un único punto en el espacio.
En la figura 1 se representan en perspectiva libre los elementos señalados y las proyecciones directa y secundarias de un punto A del espacio. En la figura 2, hacemos coincidir el plano del cuadro con el papel representando asimismo las proyecciones directa y secundarias del punto A.
Isométrica, dimétrica y trimétrica.
En función de la inclinación que el triedro tenga respecto del plano de proyección, así resultará en proyección la posición relativa de los ejes. Si el ángulo que cada uno de estos ejes forma con el plano de proyección -ángulo de pendiente-, es idéntico, idéntico será también el ángulo que exista entre ellos una vez queden proyectados sobre el cuadro. La suma total de ángulos entre los tres ejes es siempre 360º y por tanto en este caso el ángulo comprendido entre ellos será de 120º, cuando se da esta circunstancia, la perspectiva axonométrica adopta el término particular de ISOMÉTRICA.
Si la inclinación del triedro es tal que dos de los ejes forman 2 ángulos iguales y uno desigual, estamos en otro caso particular denominado DIMÉTRICA, denominándose TRIMÉTRICA cuando los tres ángulos son desiguales. Figuras 5 A B y C.
El triángulo de las trazas es equilátero en el primer caso, isósceles en el segundo y escaleno en el tercero.
COEFICIENTES DE REDUCCIÓN
En general, cuando un segmento oblicuo a un plano se proyecta sobre él, dicha proyección experimenta una reducción. Cuando la proyección es ortogonal al plano de proyección, la magnitud de la proyección es igual a la verdadera magnitud del segmento multiplicada por el coseno del ángulo que este forma con el plano. Este coseno recibe el nombre de coeficiente de reducciónen el sistema de representación axonométrico. Figura 1.
En este sistema las aristas del triedro de referencia proyectadas sobre el cuadro en los ejes OX, OY y OZ experimentan la reducción mencionada por ser oblicuas a dicho plano y tratarse de una proyección cilíndrica ortogonal. El ángulo a comprendido entre el plano de proyección y cada una de las aristas, que se denomina ángulo de pendiente, determina como hemos dicho, la reducción correspondiente a cada eje.
En Isométrica el ángulo de pendiente es igual para los tres ejes y por tanto el coeficiente de reducción (C=0,816), la reducción que los ejes experimentan es por tanto, la misma.
En Dimétrica tenemos 2 ángulos de pendiente diferentes, uno para dos de los ejes y otro para el tercero, los primeros experimentarán una reducción diferente a la del tercero.
En Trimétrica 3 son los ángulos de pendiente, uno para cada uno de los ejes y tres serán por tanto los coeficientes de reducción a aplicar.
Las reducciones de las unidades de los ejes o de segmentos axonométricos (paralelos a estos) expresados según coordenadas x, y, z, pueden calcularse multiplicándola verdadera magnitud por el coeficiente de reducción correspondiente o bien gráficamente
TRIÁNGULO DE TRAZAS
Es un método gráfico para reducir las magnitudes al sistema.
Abatiendo las aristas del triedro sobre el plano secante P paralelo al cuadro y que genera el triángulo fundamental ABC, tenemos estas en verdadera magnitud.
Situamos en estas aristas abatidas la verdadera magnitud de la unidad de medida U con que estemos trabajando (u otra medida cualquiera de la que queramos conocer su reducción) y desabatimos obteniendo de este modo las reducciones correspondientes a cada eje. Para abatir las aristas tendremos en cuenta que en el vértice O donde concurren forman ángulos rectos.
Dados los ejes del sistema (o aristas del triedro proyectadas sobre el cuadro), los abatiremos sobre el plano secante P a partir de las caras del triedro que las contienen y tomando como charnelas los lados del triángulo fundamental ABC que este genera. En el ejemplo de la figura 7 abatimos primero el plano XOY y con él los ejes OX y OY en OX1 y OY1 y el vértice O en O1, tomando como charnela el lado BC del triángulo fundamental.lo fundamental ABC, tenemos estas en verdadera magnitud.
Para ello trazamos un arco capaz de 90º para el segmento BC que nos sirve de charnela puesto que, y tras el abatimiento, el ángulo X1O1Y1 ha de ser recto como hemos dicho. La nueva posición O1 del vértice O tras el abatimiento (necesariamente sobre una recta perpendicular a la charnela y conteniendo al vértice O), será punto de concurrencia de las aristas OX1 y OY1 abatidas que ademas pasarán por los puntos B y C pues, por pertenecer estos a la charnela, no sufren variación en el proceso. Del mismo modo procedemos para abatir el eje OZ en OZ1, abatiendo en esta ocasión el plano XOZ y tomando para ello como charnela el lado CA del triángulo de las trazas.
Abatidos los tres ejes, situamos sobre ellos, a partir de las diversas posiciones de O1 y sobre los ejes abatidos correspondientes, la unidad de medida una o varias veces, o cualquier medida que necesitemos reducir. Desabatiendo los ejes, obtendremos las proyecciones reducidas de las medidas tomadas. Para desabatir tendremos en cuenta que los segmentos que contienen a un par de puntos homólogos son siempre, en abatimientos con sistemas de representación que utilicen proyecciones cilíndricas ortogonales, perpendiculares a la charnela de abatimiento
COEFICIENTE DE REDUCCIÓN PARA ISOMÉTRICOhttps://www.youtube.com/embed/7pHrn7-oCZo?wmode=opaque
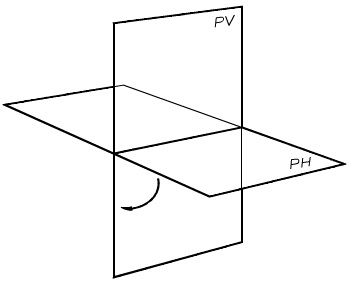
El sistema diédrico es un método gráfico el cual consiste en obtener la imagen de un objeto (en planta y alzado), mediante la proyección de haces (rayos) proyectantes perpendiculares a dos planos principales de proyección.
plano horizontal (PH) y plano vertical (PV).
El objeto queda representado por su vista frontal (proyección en el plano vertical) y su vista superior (proyección en el plano horizontal); también se puede representar su vista lateral, como proyección auxiliar.
A estas dos proyecciones se les suele llamar en el dibujo técnico Alzado y Planta. La tercera vista, la vista lateral se llamaría Perfíl.
Representación de un Punto
Un punto situado en el espacio se representa mediante sus dos proyecciones (a modo de sombras) sobre los planos principales: proyección horizontal y proyección vertical.
Cota Se denomina cota de un punto del espacio a la distancia entre él y su proyección en el plano horizontal, o lo que es lo mismo la distancia entre la proyección vertical y la línea de Tierra (LT).
Alejamiento Se denomina alejamiento de un punto del espacio a la distancia entre el y su proyección en el plano vertical, o lo que es lo mismo a la distancia entre la proyección horizontal y la línea de Tierra (LT).
Vamos a representar un punto. Lo primero es que para dibujar sus dos proyecciones sobre los planos en un papel tendremos que abatir (abrir) los dos planos para que nos quede en dos dimensiones (las que tiene el papel) y luego dibujar sus proyecciones sobre los planos.
En la figura tenemos el punto colocado en el espacio sobre los dos planos y a la derecha vemos la representación sobre el papel.
Representación de Una Recta
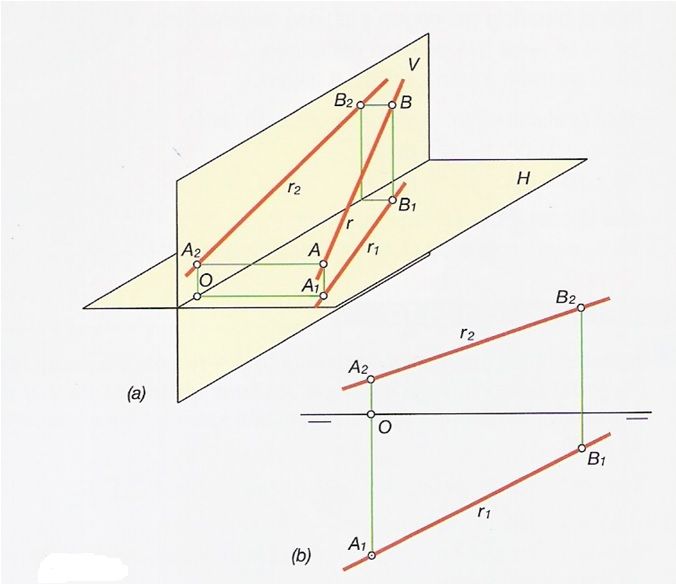
Una recta está definida cuando se conocen sus dos proyecciones, horizontal y vertical. La proyección de una recta sobre un plano es otra recta, formada por la proyección de todos los puntos de ella.
Conociendo las parejas de proyecciones (sobre el plano vertical y sobre el horizontal) de dos puntos de una recta, se obtiene la proyección uniendo los dos puntos.
Fíjate en la figura hemos cogido dos puntos cualquiera de la recta A y B para sacar sus proyecciones.
En la parte de abajo sería como se dibujaría en el papel la recta, mediante sus proyecciones.
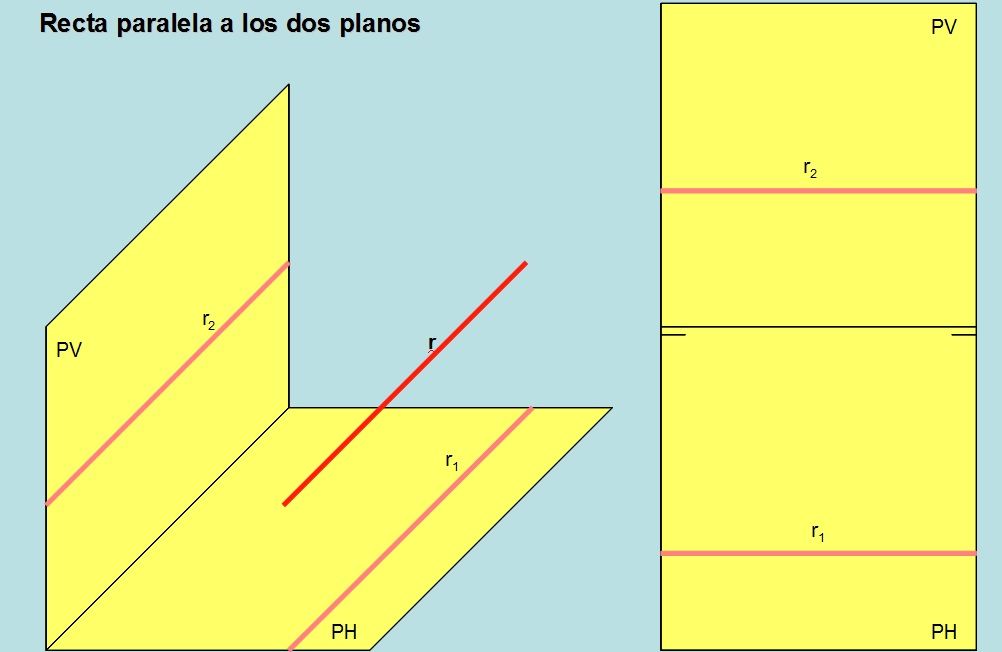
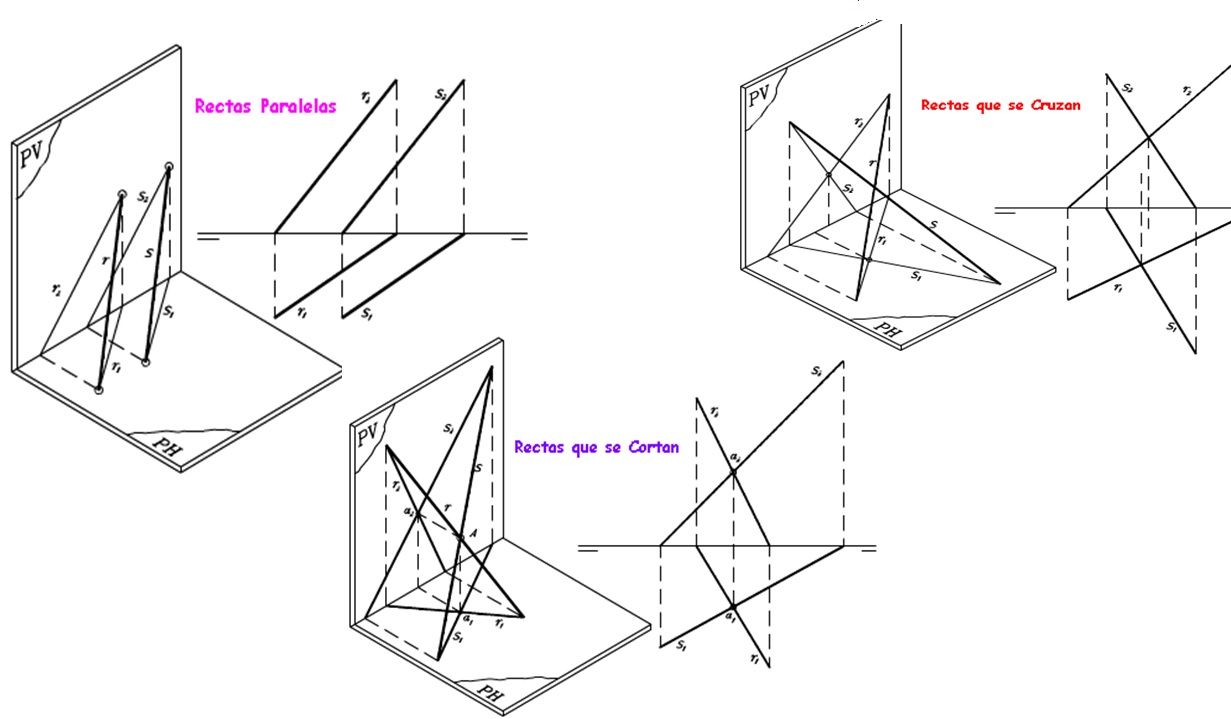
Veamos como sería una recta paralela a los dos planos:
Ahora veamos dos rectas en diferentes posiciones y su representaciones:
Representación de Un Plano
Hasta ahora hemos aprendido los conceptos y procedimientos para determinar las proyecciones diédricas de un punto y una recta; y aunque hemos nombrado algunas veces al plano, solamente ha sido para referirnos a los de proyección.
Generalmente entendemos que una superficie plana es aquella que puede contener una recta imaginaria en cualquier dirección.
La definición anterior la podemos aplicar a la hora de referirnos a un plano en el sistema diédrico.
Así pues, las caras de una forma, objeto, poliedro, etc., son planos delimitados por aristas (rectas) y vértices (puntos).
En el sistema diédrico entendemos que un plano es una superficie plana infinita e ilimitada.
Para definir un plano necesitamos los siguientes elementos geométricos: tres puntos cualesquiera que no estén alineados, una recta y un punto exterior a ella, dos rectas que se cortan y dos rectas paralelas.
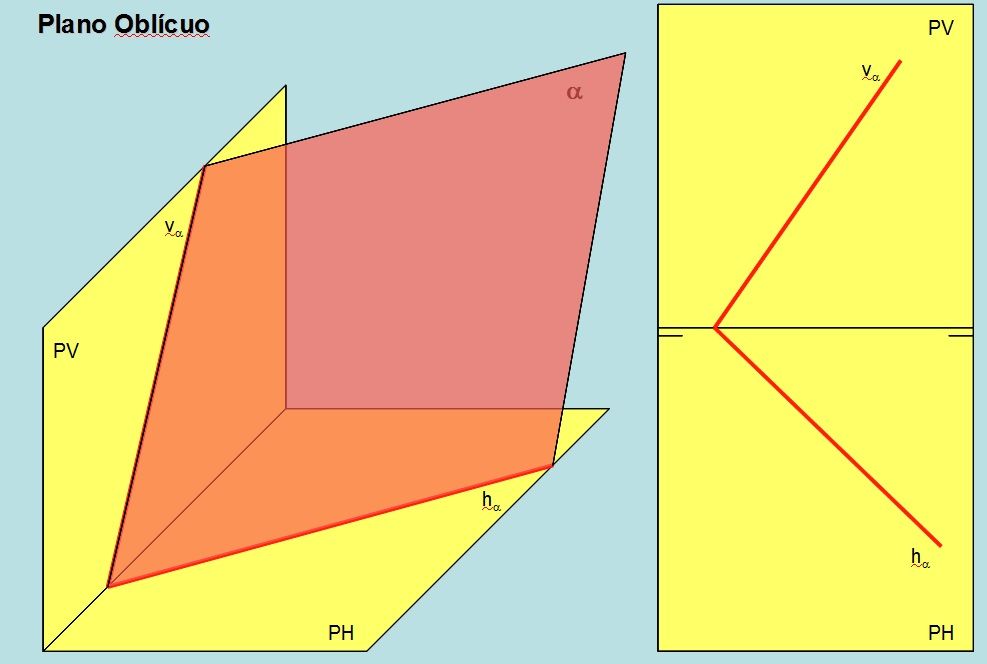
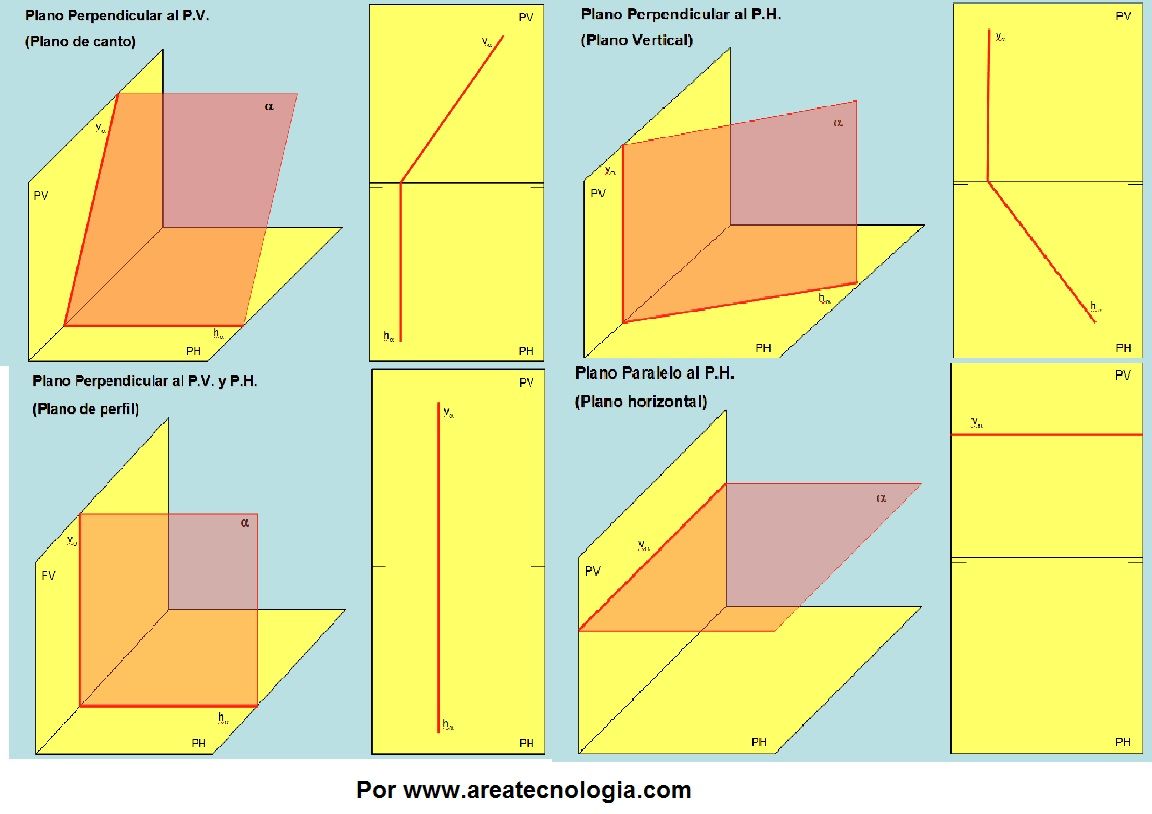
Un plano se representa mediante sus trazas. Las Trazas de un plano son las rectas intersección del plano con los planos de proyección.
Veamos situaciones de planos en sistema diedrico diferentes.
En la siguiente presentación os dejamos más sobre diedrico con ejercicios resueltos para que veas como se representan más rectas y planos en diedrico.
Y en este video explica el sistema diedrico desde cero.
La Inversión en Dibujo Técnico es una transformación geométrica en la que a una figura corresponde otra y en la que se cumple que:
Dos puntos inversos (A, A’) están alineados con un punto fijo llamado Centro de Inversión (O),
El producto de la distancia de un punto al Centro de Inversión por la distancia de su inverso al Centro de Inversión es constante (K) y se llama Potencia de Inversión.
Esto quiere decir que OA·OA’ = OB·OB’ = OT·OT = K
Trazando sucesivas rectas secantes a esta circunferencia encontramos más puntos y sus inversos. Puesto que K es constante, cuanto mayor sea OA, menor será OA’, es decir, cuando más alejado esté un punto A del Centro O, más cerca estará su inverso A’ del Centro O.
Existe una distancia para la cual un punto A y su inverso son iguales.
Lo puedes ver en el dibujo anterior. Se trata del punto de tangencia. El punto T coincide con su inverso y para él también se cumple que
OT·OT = K
Por tanto,
OT = Raíz cuadrada de K
Todos los puntos situados a la misma distancia del centro de inversión que este punto T son dobles. A este Lugar Geométrico se le llama Circunferencia de Puntos Dobles (CPD)
CIRCUNFERENCIA DE PUNTOS DOBLES O CIRCUNFERENCIA DE AUTOINVERSIÓN
La Circunferencia de Puntos Dobles (o circunferencia de Autoinversión) es el Lugar Geométrico de los puntos del plano que tienen sus inversos en sí mismos. Estos puntos equidistan del Centro de Inversión una distancia igual a la raíz cuadrada de la Potencia de Inversión K.
CÓMO DIBUJAR LA CIRCUNFERENCIA DE PUNTOS DOBLES
En realidad es muy sencillo. Dibuja una circunferencia que contenga dos puntos inversos A-A’ y dibuja la recta tangente a dicha circunferencia desde el Centro de Inversión. Esto determinará un punto de Tangencia.
La circunferencia con centro en O y radio O-T es la Circunferencia de Puntos Dobles.
En el dibujo anterior está muy claro.
CARACTERÍSTICAS DE LA INVERSIÓN
1. Dos pares de puntos inversos no alineados forman siempre una circunferencia
2. Dados dos puntos A, B y sus inversos A’, B’, las rectas A-A’ y B-B’ son antiparalelas de las rectas A-B y A’-B’
Esto quiere decir que el ángulo que forma la recta A-A’ con A’-B’ y con A-B son iguales que los que forma la recta B-B’ con A-B y con A’-B’ respectivamente.
3. Si K>0, la Inversión es positiva. Si K<0, es negativa y en este último caso la Inversión no tiene puntos dobles.
DETERMINAR UNA INVERSIÓN
Una Inversión puede venir determinada de 3 maneras diferentes:
Dado el Centro de Inversión y un par de puntos inversos
Dado el Centro de Inversión y la Potencia de Inversión
Dados dos pares de puntos inversos no alineados.
Veamos a continuación cada uno de los casos.
1. Dado el Centro de Inversión O y un par de puntos inversos A, A’, determinar el punto inverso de B.
Dibuja la circunferencia que pasa por A, A’ y B. Para ello traza las mediatrices de los segmentos A-A’ y A-B. El punto de intersección es el centro de la circunferencia que buscamos. Une B con el Centro de Inversión y obtendrás B’.
2. Dado el Centro de Inversión O y el valor de la inversión OT, determinar el punto inverso de A
Dibuja una circunferencia de radio OT con centro en el Centro de Inversión. Esta es la Circunferencia de Puntos Dobles. Toma un punto T cualquiera de la circunferencia. Dibuja la mediatriz del segmento A-T y la tangente a la circunferencia por T. En la intersección de ambas rectas se encuentra el centro C de una circunferencia de radio C-T que contiene el inverso de A. Une O con A para encontrarlo.
3. Dados dos pares de puntos inversos A, A’ y B, B’, determinar el punto inverso de D.
En la intersección de las rectas A-A’ con B-B’ se encuentra el Centro de Inversión. Dibuja la circunferencia que pasa por los puntos A, A’ y D. Une O con D y obtendrás D’ sobre dicha circunferencia.
LOS 5 CASOS DE INVERSIÓN
A continuación conocerás los 5 casos posibles de inversión. Estos los podrás aplicar a cualquier problema que se te presente.
1. La inversa de una recta que pasa por el Centro de Inversión es ella misma
¡Ojo! Esto no significa que cada punto sea inverso de sí mismo. Esto sólo ocurre en los puntos pertenecientes a la Circunferencia de Puntos Dobles.
Significa que un punto contenido en esa recta tendrá su inverso en la misma recta.
¿Cómo obtener, en este caso, el punto inverso?
Dados un Centro de Inversión O, un par de puntos inversos A, A’ y un punto B,
Toma un punto C aleatorio que no pertenezca a la recta y dibuja la circunferencia que contiene a A, A’ y C. Por la propiedad de que dos pares de puntos inversos siempre forman una circunferencia, podemos asegurar C’ estará en esta circunferencia.
Dibuja la circunferencia que pasa por C, C’ y B. En el punto de corte de esta circunferencia con la recta A-A’ se encuentra B’
(He borrado los trazados auxiliares para evitar confusiones en el dibujo. Como sabes, el centro de la circunferencia que pasa por tres puntos está en la intersección de las mediatrices de dos de los segmentos que unen dichos puntos)
2. La inversa de una recta que no pasa por el Centro de Inversión es una circunferencia que sí pasa por el Centro de Inversión.
Se cumple además que la recta que une el Centro de Inversión con el centro de la circunferencia es perpendicular a la recta dada.
Dados el Centro de Inversión O, un par de puntos inversos A, A’ y una recta r,
Dibuja la recta perpendicular a la dada que pase por el Centro de Inversión. Sobre esta recta se encontrará el centro.
Toma un punto cualquiera B de la recta y encuentra su inverso B’, haciendo pasar una circunferencia por A, A’ y B.
Dibuja la mediatriz de O-B’, ya que la circunferencia debe pasar por ambos puntos. Esta determinará el centro de la circunferencia inversa de r, cuyo radio será O-B’
3. La inversa de una circunferencia que pasa por el Centro de Inversión es una recta que no pasa por el Centro de Inversión
Este es el caso complementario del anterior. Dados un Centro de Inversión, un par de puntos inversos y una circunferencia, la recta inversa que buscamos será perpendicular a la recta O-C. Por tanto, dibuja la recta O-C y su perpendicular por el punto A’.
4. La inversa de una circunferencia que no pasa por el Centro de Inversión es otra circunferencia homotética de la primera.
Dados el Centro de Inversión, un par de puntos inversos y una circunferencia
Une el centro de la circunferencia con el Centro de Inversión. Sobre esta recta estará el centro de la circunferencia inversa.
Dibuja ahora la recta tangente a la circunferencia desde el Centro de Inversión. Como sabes, tienes que dibujar la mediatriz del segmento O-C y desde el punto medio M trazar un arco de circunferencia con radio M-O. Los puntos de corte determinan los puntos de tangencia T.
Halla el inverso T’ del punto de tangencia T. Este se encontrará en la circunferencia que pasa por T, A y A’.
Por el punto T’, pasa una perpendicular a la recta O-T y estó definirá el centro de la circunferencia inversa.
5. La inversa de una circunferencia que pasa por un par de puntos inversos es inversa de sí misma.
¡Atención! Cada punto de la circunferencia no es inverso de sí mismo, sino que cada punto de la circunferencia tiene su inverso sobre la propia circunferencia.
Esto se basa en la 1ª característica de la Inversión que he enunciado más arriba: Dos pares de puntos inversos no alineados forman siempre una circunferencia.
POTENCIA DE UN PUNTO RESPECTO DE UNA CIRCUNFERENCIA
Las rectas tangentes o secantes trazadas a una circunferencia desde un punto P exterior, quedan interceptadas por la circunferencia según segmentos en los que siempre se verifica que: PA x PB = PC x PD = PT x PT = PT2 = cte.
A este producto constante se le denomina POTENCIA del punto P respecto a la circunferencia. Cuando el punto es interior la potencia es negativa. FIG. 1.
Potencia de un punto respecto de una circunferencia
EJE RADICAL
Se llama eje radical al lugar geométrico de los puntos del plano que tienen igual potencia respecto a dos circunferencias. (Cada punto tendrá diferente potencia que el contiguo pero igual respecto a las dos circunferencias)
El eje radical es siempre perpendicular al segmento que une los centros de las circunferencias.
Eje radical de dos circunferencias secantes
Los puntos comunes (X e Y) de las dos circunferencias secantes tienen igual potenciarespecto a las mismas luego pertenecen al eje radical. Uniendo X e Y obtenemos dicho eje, eje que es efectivamente perpendicular al segmento O1O2. FIG. 2
La potencia de los puntos X e Y respecto de las circunferencias es NULA. Podemos comprobar como desde un punto P del eje radical se cumple:
PA x PB = PC x PD
Eje radical de dos circunferencias secantes
Eje radical de dos circunferencias tangentes
La recta tangente común es el eje radical de las dos circunferencias, y como podemos comprobar, es perpendicular al segmento unión de centros O1O2. FIG. 3
Eje radical de dos circunferencias tangentes
Eje radical de dos circunferencias exteriores
Para calcularlo trazamos una circunferencia auxiliar O3 que corte a ambas. Los ejes radicales de cada una de las circunferencias dadas con la auxiliar se cortan en X, el cual pertenece al eje radical de las dos circunferencias dadas O1,O2 desde donde trazamos una perpendicular al segmento unión de centros O1O2. FIG. 4
Eje radical de dos circunferencias exteriores
CENTRO RADICAL DE TRES CIRCUNFERENCIAS DADAS
Se llama centro radical de tres circunferencias dadas al punto de intersección de sus ejes radicales correspondientes. Basta para obtenerlo trazar dos de los ejes radicales de las tres circunferencias que se obtienen según los métodos descritos. Figura 5





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}